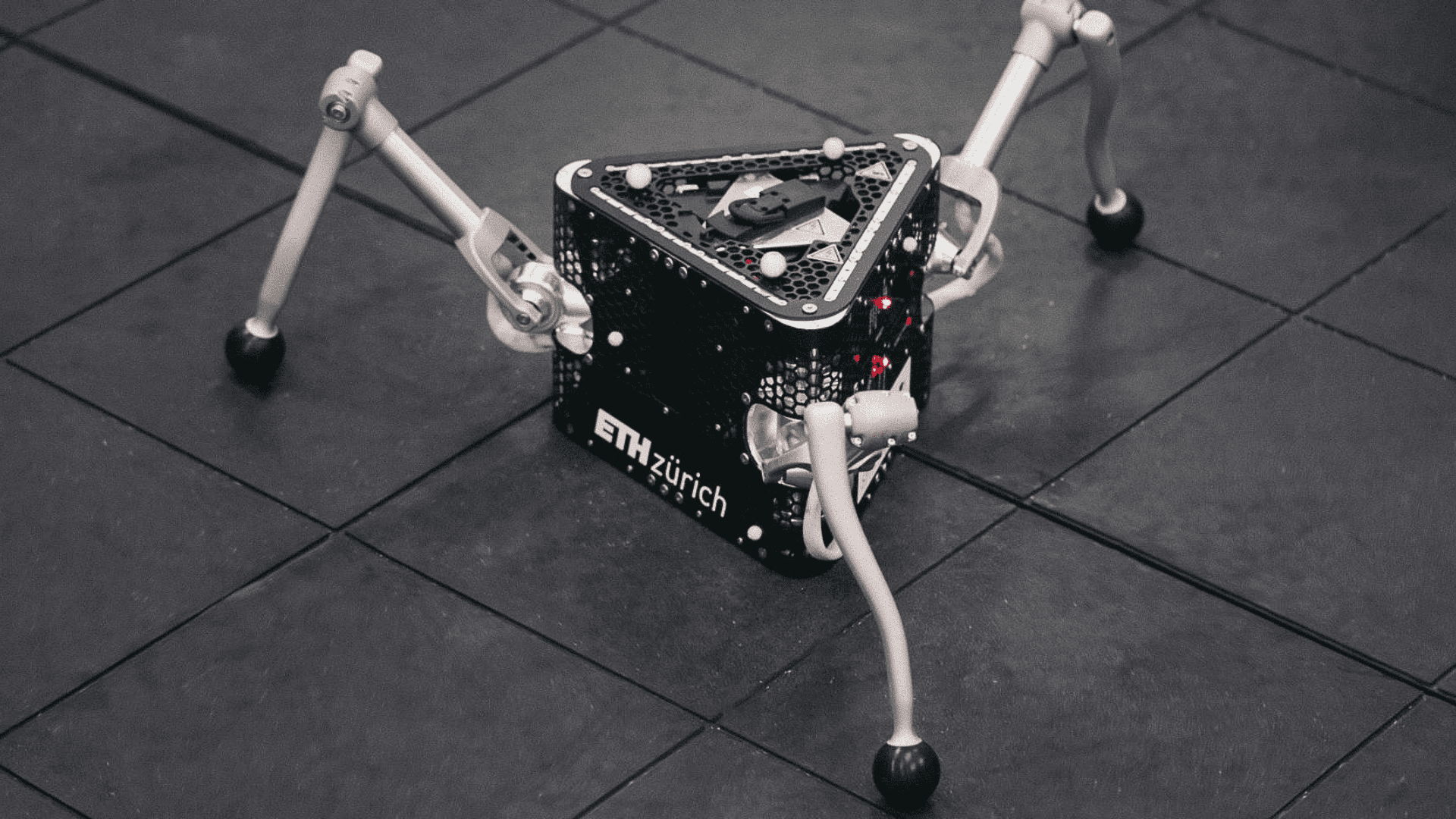
Students at ETH Zurich are working on a three-legged robot that can hop around in microgravity. This robot can navigate low-gravity environments, like asteroids, with its jumping-like form of transportation.
SpaceHopper Robot
The students developing the SpaceHopper hope that the three-legged robot can one day explore small celestial bodies, like asteroids or moons. Scientists believe that the celestial bodies contain valuable mineral resources that humans could use in the future. In addition, they believe exploring these bodies could give us insight into the universe’s formation.
The SpaceHopper project started two and a half years ago. At the time, it was an ETH Zurich focus project for Bachelor’s degree students. It is now a continued project by five Master’s degree students and one doctoral student.
Low-Gravity Exploration
Asteroids and moons are challenging to explore because they have a low-gravity environment. In an area with no gravity, there is no traction between a spacecraft’s wheels and the ground it drives on. This makes it challenging for astronauts to explore them. But that is where the SpaceHopper comes in with hopes that its leaping capabilities can maneuver around low-gravity environments.
Instead of wheels, the robot has three legs. Rather than driving, it uses small bounces to move upwards and sideways. In a test flight, the researchers simulated a low-gravity area the tri-leg robot may one day be deployed to. During the simulation, moments of zero gravity forced the robot to kick each of its legs in coordinated movements to stay lifted. The periods of zero gravity occurred about 30 times per flight, for about 20-25 seconds each.
In a video of the test flights the researchers said, “The experiments were very successful. We were able to show that the robot can use its legs to reposition itself and jump in a certain direction.” They said, “Overall, it was very successful.”
SpaceHopper’s Build
According to the project’s website, the robot has three legs with three degrees of freedom each. The website says this is “the optimal lightweight solution for jumping in low gravity.” Because the robot lacks a preferred orientation, movement in any direction is easy according to the project’s site.
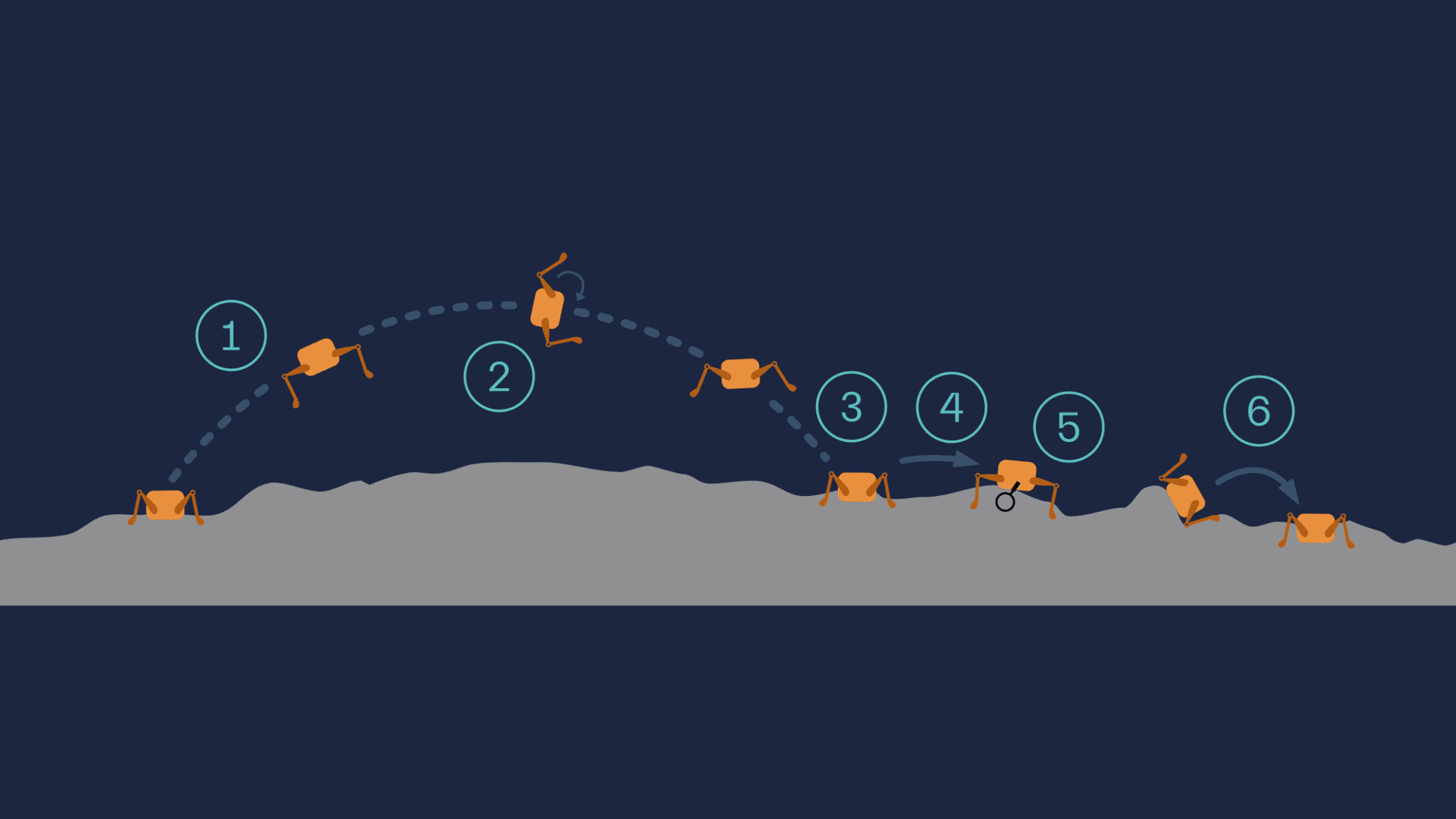
The researchers and developers created a new way for a spacecraft to move, comprising “six movement capabilities that ensure reliable and fast travel on an asteroid.” Below is the description of each movement as shown in the graphic underneath.
- Hop to Traverse Large Distances
- Attitude Control During Flight
- Controlled Landing at Target Point
- Precise Short-Distance Locomotion
- Ability to Carry a Scientific Payload
- Self-Righting After Landing
As development continues, researchers and students with ETH Zurich hope to one day explore the surface of an asteroid.