Robots and their capabilities continue to improve every single day. At the forefront of that innovation is typically Carnegie Mellon University (CMU) in Pittsburgh, Pennsylvania. The university’s latest project is a robot that resembles a lizard but is inspired by insects.
Loris Robot
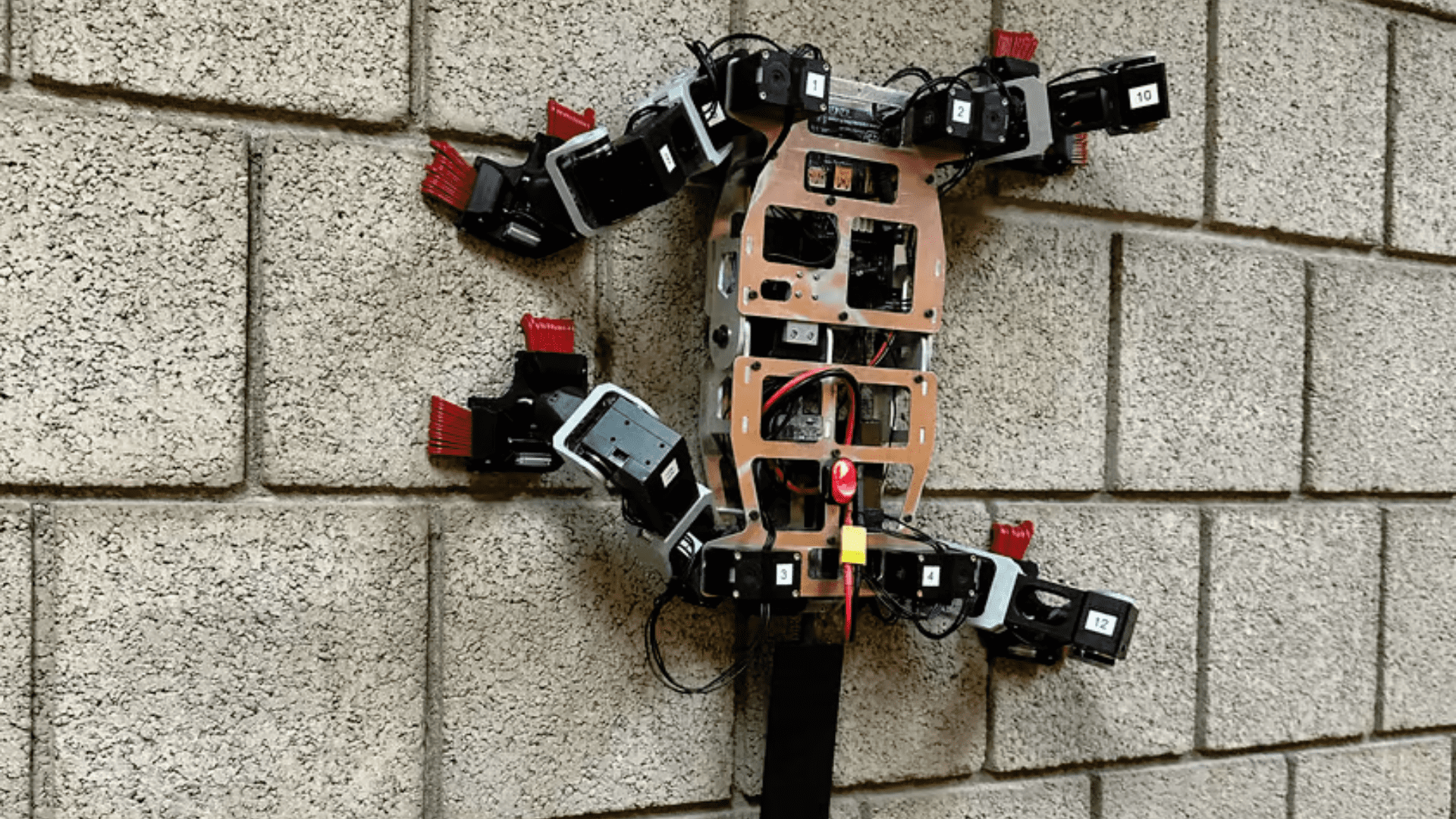
Meet CMU’s Loris robot. The robot is a four-legged machine that climbs rough vertical surfaces. This is a revolutionary concept because of the difficulty of these surfaces. The mechanics of the robot are effective yet simple.
Similar robots use a suction mechanism to climb smooth surfaces. However, such technology can’t climb rocky surfaces because it can’t form a seal. There are several alternatives. One includes a mechanism known as microspine grippers. These grippers have tiny hooks that snag onto the surfaces the device is climbing. The hooks release when the robot is ready to take the next step.
Sometimes microspine grippers rely on the robot’s hanging weight to maintain a hold. While this method is good for smoother surfaces, it can be ineffective on areas like cliffs with irregular surfaces. Then there are active microspine grippers. These grippers get around the limitation of rocky walls. By incorporating electric actuators, they sink a ring of hooks into the surface and maintain a hold in any direction. However, the grippers tend to be bulky and complex. They rely on a lot of energy and have relatively slow climbing speeds. This is where the Loris quadruped steps in.
Lightweight Robot, Irregular Slopes
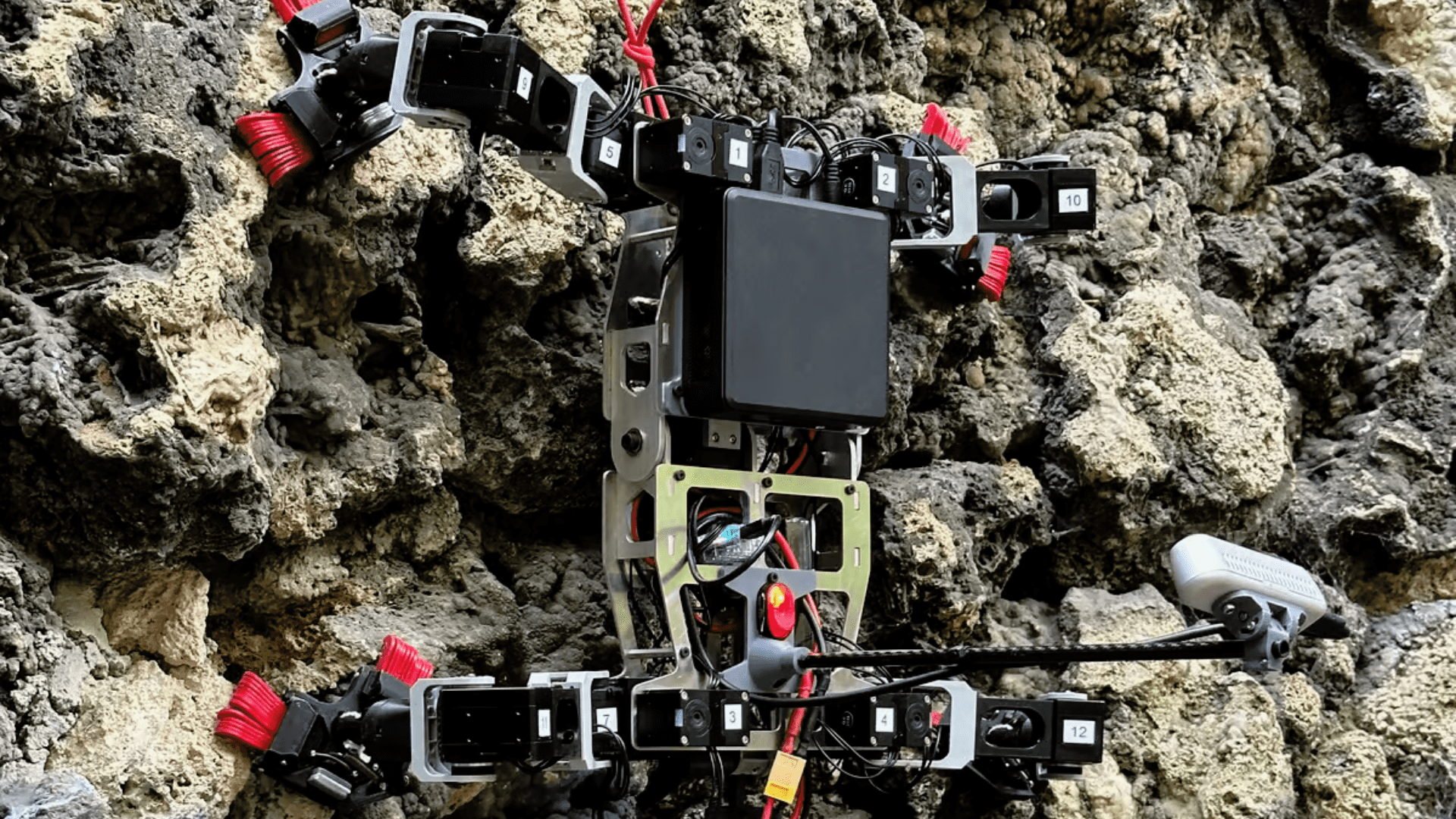
Loris stands for “Lightweight Observation Robot for Irregular Slopes.” The name Loris comes form the climbing marsupial. Paul Nadan, Spencer Backus, Aaron M. Johnson and colleagues at Carnegie Mellon University’s Robomechanics Lab all helped create the machine.
Each of the robot’s four legs has a played microspine gripper. They incorporate two groups of spines at a right angle to one another. This gripper is connected to the leg by a passive wrist joint. Essentially, this allows the gripper to flop around in response to the leg’s movements. The Loris robot is also equipped with a depth-sensing camera and microprocessor. This allows it to strategically advance its legs so that when a gripper on one leg grabs ahold of a surface, the opposing gripper on the opposite leg does the same. In this case, the opposite leg is the diagonal on the opposite side of the robot’s body.
As long as the opposing legs maintain inward tension on their grippers, they stay firmly attached to the surface. Meanwhile, the two other legs are capable of moving freely. This climbing strategy is inspired by insects called directed inward grasping (DIG). According to the CMU researchers, Loris is lightweight, fast, and energy efficient.